Цена:
4 800.00 руб.
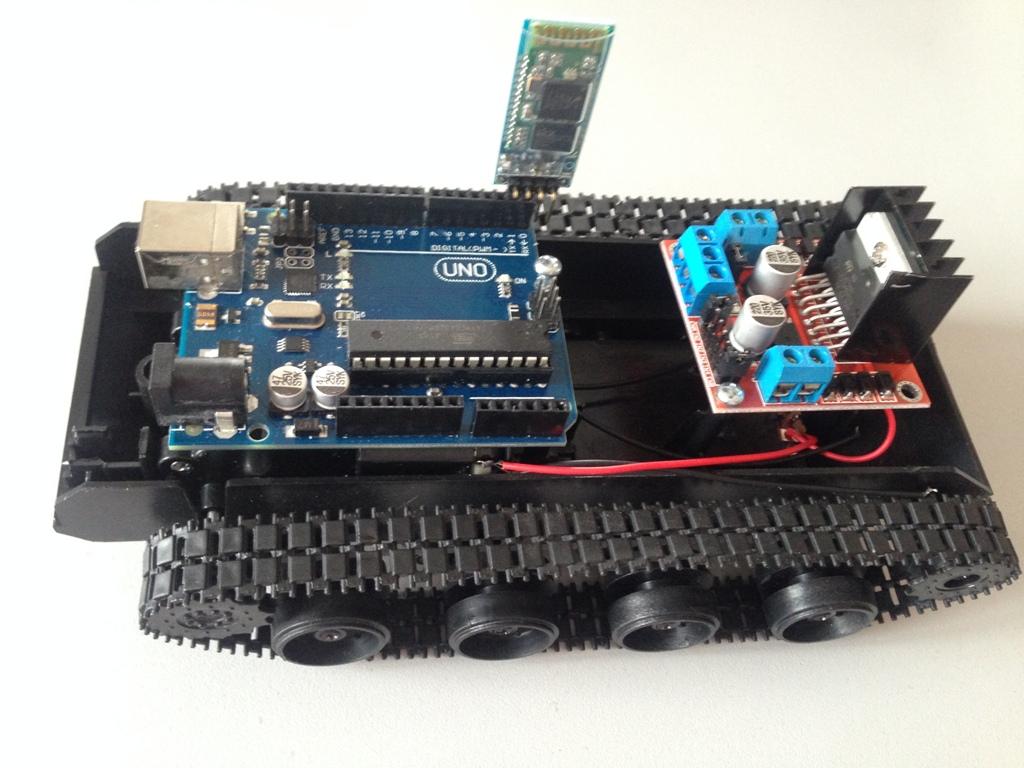
Тележка с Bluetooth управлением
Состав набора:
Гусеничные шасси с двумя моторами и бат. отсеком на 4АА
Arduino Uno R3 с кабелем
Драйвер двухканальный моторов на L298N/2A
Bluetooth адаптер HC-06 (05)
провода для пайки 5 штук
провода п-п 5 штук
провода п-м 6 штук
кабель питания
саморезы 4 штуки
аккумуляторы в комплект не входят !!!!
Motor Shiel L298N
Для подачи питания на плате установлен трехсекционный клемник. Красный (2 мотора, Вх от 5 до 35V), желтый (GND), синий (5V) и черный (Пины управления). Пины подключаем так:
Вывод Arduino DIGITAL 7 - к IN1 пину модуля.
Вывод Arduino DIGITAL 5 - к IN2 пину модуля.
Вывод Arduino DIGITAL 4 - к IN3 пину модуля.
Вывод Arduino DIGITAL 2 - к IN4 пину модуля.
Вывод Arduino DIGITAL 6 - к ENA пину модуля.
Вывод Arduino DIGITAL 9 - к ENB пину модуля.
Вывод Arduino GND - к GND клеме модуля.
Большинство запитывают контроллер и силовую часть от разных источников. Но мы будем запитываться от одного источника. У шилда есть какой никакой стабилизатор, но если вы подадите напряжении более 12, то нужно будет снять джамперы, иначе чревато выхода из строя нашего шилда.

Bluetooth модуль HC-06
Подключение модуля самая простая вещь, проще только аккумулятор. И так нам надо сделать так:
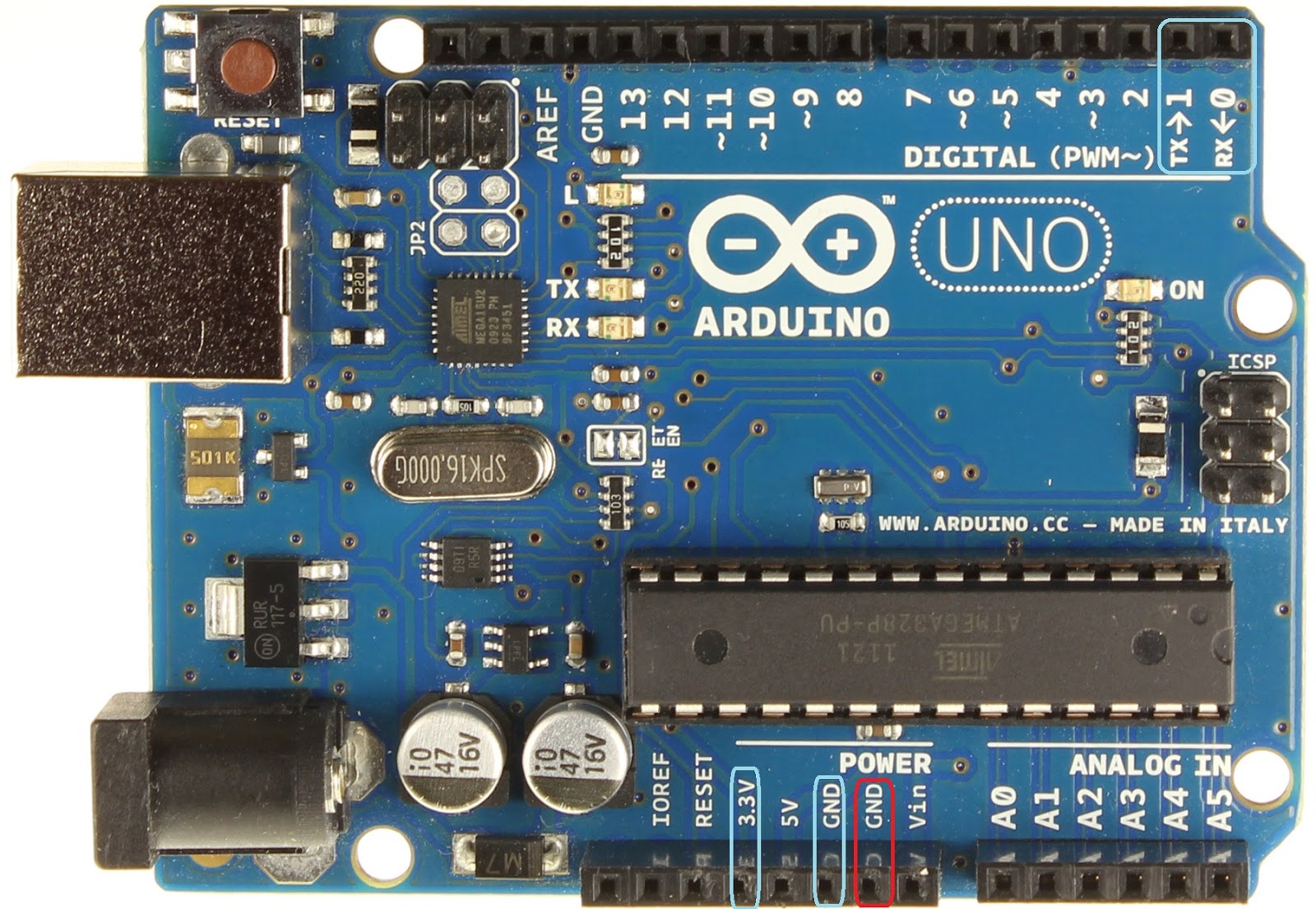
Вывод Arduino VCC - к 3.3V пину модуля.
Вывод Arduino GND - к GND пину модуля.
Вывод Arduino TX - к RX пину модуля (1).
Вывод Arduino RX - к TX пину модуля (2).
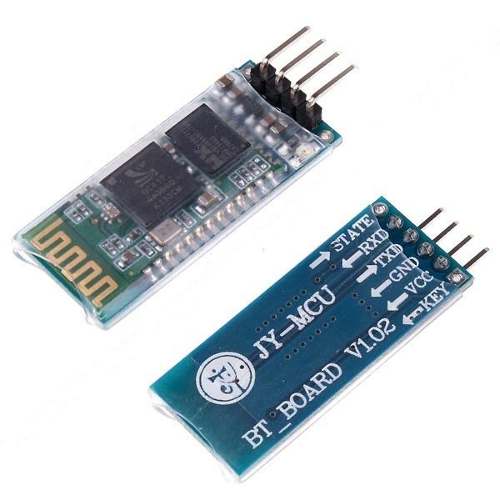
Как только вы подадите питание, диод на модуле начнет мигать, как только вы с ним установите связь с помощи Android телефоном, он перестанет мигать и будет статично гореть. Пароль для подключения 1234.
Arduino UNO
Arduino Uno, мы запитываем от нашего аккумулятора 7.2V, стабилизатор понизит наше напряжение до 5V. Подключаем провода в те пины как ранее было написано.
Синий цвет – Bluetooth
Красный цвет - Motor Shiel L298N
Скетч для Arduino UNO
#define MIN_speed 0
int PIN_ENB = 9;
int PIN_ENA = 6;
int PIN_IN4 = 2;
int PIN_IN3 = 4;
int PIN_IN2 = 5;
int PIN_IN1 = 7;
int LED_PIN = 13;
float vel,ks,m1,m2;
float spl, spr;
int quadr = 0;
int ver, hor;
unsigned char mode;
unsigned char oldmode;
unsigned char iSpeed;
unsigned char rx_buf[8];
unsigned char rxcnt;
boolean binv = 0;
boolean rx_ok;
// Правый мотор
void RM_foward()
{
digitalWrite(PIN_IN1, LOW);
digitalWrite(PIN_IN2, HIGH);
}
void RM_back()
{
digitalWrite(PIN_IN1, HIGH);
digitalWrite(PIN_IN2, LOW);
}
// Левый мотор
void LM_foward()
{
digitalWrite(PIN_IN4, LOW);
digitalWrite(PIN_IN3, HIGH);
}
void LM_back()
{
digitalWrite(PIN_IN4, HIGH);
digitalWrite(PIN_IN3, LOW);
}
void setup()
{
Serial.begin(9600);
pinMode(PIN_ENB, OUTPUT);
pinMode(PIN_IN4, OUTPUT);
pinMode(PIN_IN3, OUTPUT);
pinMode(PIN_IN2, OUTPUT);
pinMode(PIN_IN1, OUTPUT);
pinMode(PIN_ENA, OUTPUT);
pinMode(LED_PIN, OUTPUT);
digitalWrite(PIN_IN1, LOW);
digitalWrite(PIN_IN2, LOW);
digitalWrite(PIN_IN4, LOW);
digitalWrite(PIN_IN3, LOW);
digitalWrite(PIN_ENA, LOW);
digitalWrite(PIN_ENB, LOW);
}
//Параметры задания скорости
void setspeed()
{
float sf1;
//левый двигатель
if (spl>0.0) LM_foward(); else LM_back();
sf1=abs(spl);
sf1=sf1*(255-MIN_speed)+MIN_speed;
if (spl==0.0) sf1=0;
iSpeed = int(sf1);
analogWrite(PIN_ENA, iSpeed);
//правый двигатель
if (spr>0.0) RM_foward(); else RM_back();
sf1=abs(spr);
sf1=sf1*(255-MIN_speed)+MIN_speed;
if (spr==0.0) sf1=0;
iSpeed = int(sf1);
analogWrite(PIN_ENB, iSpeed);
}
void loop()
{
if (Serial.available() == 7)
{
rxcnt=0;
digitalWrite(LED_PIN, binv);
binv=!binv;
while (Serial.available() > 0)
{
rx_buf[rxcnt] = Serial.read();
rxcnt++;
}
//Контроль целостности пакета
rx_ok=true;
if (rx_buf[4]!=4) rx_ok=false;
//прочистка буфера
if (!rx_ok)
{
int avi = Serial.available();
Serial.print("err");
while (Serial.available() > 0)
{
avi = Serial.read();
}
}
if (rx_ok)
{
hor = rx_buf[1];
ver = rx_buf[2];
quadr = 0;
//Вычисление рабочего квадранта
float fhor=float(hor);
float fver=float(ver);
if (fhor>128.0)
{
fhor=256.0-fhor;
quadr = quadr+1;
}
if (fver>128.0)
{
fver=256.0-fver;
quadr = quadr+2;
}
//нормализация скоростей
fhor=fhor/127.0;
fver=fver/127.0;
if (fver>fhor)
{
m1 = fver;
m2 = (1.0-fhor)*fver;
} else
{
m1 = fhor;
m2 = (fver-1.0)*fhor;
}
if ((fver<0.1)&&(fhor<0.1))
{
m1=0;
m2=0;
}
//Приведение знаков скоростей по квадрантам
if (quadr==0)
{
spl=-m1;
spr=-m2;
}
if (quadr==1)
{
spr=-m1;
spl=-m2;
}
if (quadr==2)
{
spr=m1;
spl=m2;
}
if (quadr==3)
{
spl=m1;
spr=m2;
}
setspeed();
}
}
if (Serial.available() > 7)
{
int avi = Serial.available();
Serial.print("e");
while (Serial.available() > 0)
{
avi = Serial.read();
}
}
}