Цена:

Описание
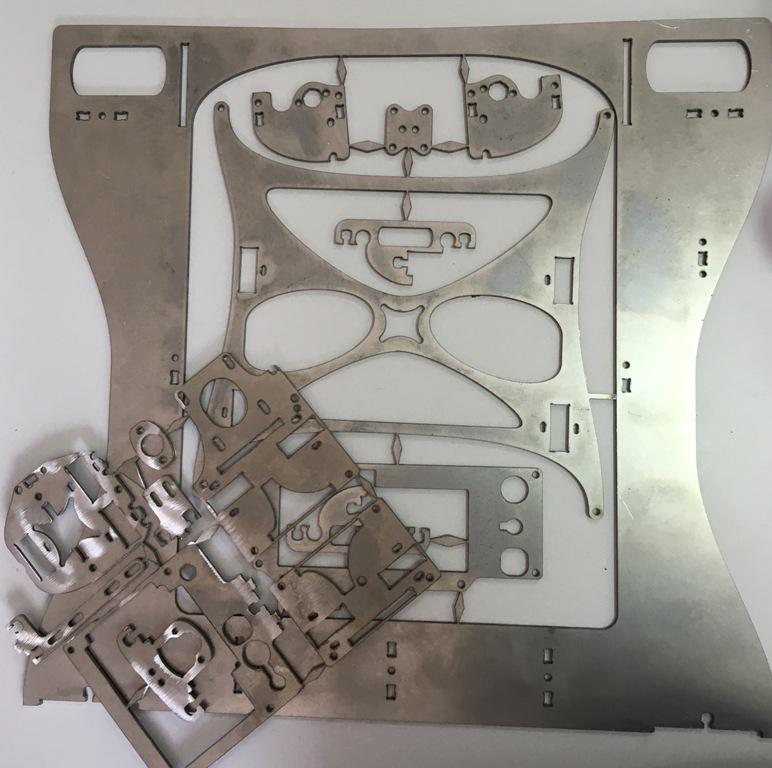
Набор деталей из 3мм стали, позволяющий собрать корпус 3D принтера Prusa i3 Steel без использования печатных деталей.
Преимущества новой версии:
- Адаптер под Bowden, Wade (L3K) и K экструдер;
- Рамка для LCD контроллера Smart и Full Graphic;
- Кронштейны для установки катушки с филаментом;
- Натяжители ремней;
- Крепления концевых выключателей;
- Крепления для Arduino Mega 2560;
- Увеличенная жесткость;
- Легкий стол - 315г;
- Улучшена геометрия и упрощена сборка;
- 4 подшипника 694Z в качестве роликов ремней.
Обновление от 10.03.16:
- Крепление для вентилятора обдува электроники
- Изменение крепления концеика Х, (для оптического и механического)
- Изменение геометрии рамы, позволяющее установить барашки под стол.
Рабочий объем печати:
200х200х180мм.
Используемые валы 8мм:
325мм - 2шт
345мм - 2шт
405мм - 2шт
В комплект входит:
- Стальные детали (под покраску) - 32шт*;
- Винт М3х10 - 43шт;
- Винт М3х20 - 6шт;
- Винт М4х20 - 2шт;
- Гайка М4 - 2шт;
- Гайка М3 - 56шт;
- Гайка М6 - 2шт.
- Стопорное кольцо 8мм - 6шт.
Для сборки остальной части принтера (электроника, концевики, моторы, экран) вам понадобится:
- Шпильки М6х1 300мм - 2шт; (опционально)
- Винт М3х6 - 12шт;
- Винт М3х10 - 14шт;
- Винт М4х20 - 4шт;
- Винт М3х60 - 1шт;
- Гайка М3 - 28шт.
- Комплект валов i3
*-количество деталей, а так же их внешний вид может отличаться от указанного в данном описании.
Руководство по сборке i3 steel
Подготовка
Перед сборкой стальные элементы рекомендуется окрасить в желаемый цвет. Необходимый инструмент:
- Отвертки с крестообразным и прямым шлицами;
- Ключи гаечные №5.5, 7 или пассатижи;
- Набор шестигранных ключей;
- Штангенциркуль или линейка;
- Нож, паяльник.
Рекомендуемые стандартные комплектующие:
- Рама с комплектом метизов;
- Направляющий вал ø8мм - 2,4м;
- Подшипник линейный LM8UU - 11шт;
- Шаговый двигатель типоразмера NEMA 17 - 5шт;
- Контроллер Arduino Mega 2560;
- Плата расширения RAMPS 1.4;
- Драйверы шаговых двигателей A4988 или DRV8825 - 4шт;
- Концевые выключатели - 3шт;
- Подшипники серии 694 или аналогичные - 4шт;
- Ремень GT2 - 2м;
- Шкив зубчатый GT2 - 2шт;
- Резьбовые шпильки М6 или трапецеидальные винты с гайками - 2шт;
- Блок питания 12В 300...360Вт;
- Провод сигнальный - 20м;
- Провод силовой - 2м;
- Вентилятор - 2шт;
- Дополнительный метиз для крепления двигателей, концевиков и прочего (М3х6 – 12шт, М3х20-4шт, М3х10-6шт);
- Изоляционная лента или термоусадочная трубка;
- Стяжки нейлоновые №2,5...3,5.
Рама
Сборка рамы производится с помощью 18-ти винтов М3х10 с гайками в следующей последовательности:



- Фланцы 2 фиксируются двумя винтами на раме 1. Кронштейны 4 и 5 на элементах 3 четырьмя винтами;
- Стенки 6 крепятся к раме с помощью четырех винтов;
- Фланцы 7 фиксируются на раме четырьмя винтами. Элементы 3 на стенках с помощью четырех винтов.
Ось Y (привод стола)
- Стол перемещается шаговым двигателем типоразмера NEMA17. Двигатель крепится с помощью четырех винтов М3х20 и восьми гаек. Затем фиксируется шкив так, чтобы зубчатый венец находился по центру оси. Чтобы избежать перекосов ремня GT-2 рекомендуется использовать пару из 20-тизубого шкива и роликов диаметром 11мм (подшипники серии 694).
- Для автоматического определения положения стола перед началом печати опционально устанавливается механический концевой выключатель(концевик). Концевик крепится двумя винтами М3х10 с гайками через шайбы(гайки), исключающие замыкание платы на корпус. Выключатели оптического типа устанавливаются аналогично, однако в этом случае необходимо достаточно аккуратно установить ответные части, чтобы избежать неполного включения/выключения оптопары.
- На рамку стола 8 устанавливается кронштейн 9 с помощью четырех винтов М3х20 и 12 гаек. Затем крепится фиксатор ремня 10 двумя винтами М3х10 с гайками.
- Четыре линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;
- Чтобы избежать "отлипания" деталей из высокотемпературных пластиков в процессе печати опционально устанавливается подогреваемый стол. Алюминиевый стол крепится через пружины четырьмя винтами М3х20 и восемью гайками со стороны рамки. Для подключения используются гибкие провода сечением не менее 0,5мм2. Текстолитовый стол устанавливается аналогично, однако для выравнивания поверхности сверху необходимо установить термообработанное стекло или зеркало.
- В центре стола с помощью каптоновой ленты или силиконового герметика устанавливается термистор для определения температуры поверхности. Проводники рекомендуется защитить от перетирания гибкой плетеной или спиральной оплеткой.
- Для удобства сборки, предварительно устанавливается ремень GT-2 длиной порядка 0,7м в фиксатор 10. Позднее, излишки можно отрезать, а натяжение отрегулировать натяжным роликом. Не рекомендуется прилагать чрезмерные усилия при регулировки натяжения зубчатого ремня и затягивании фиксатора, это не требуется и может повредить нейлоновый корд ремня.
- Далее стол в сборе устанавливается на линейные направляющие ø8мм длиной не менее 350мм. Направляющие фиксируются четырьмя стопорными кольцами из комплекта метизов или небольшим количеством "супер" клея. Клей придает дополнительную вибростойкость раме и, при необходимости, легко удаляется с полированной поверхности направляющих.
-
Ось Z (вертикальная ось)
- В деталях 11 и 12 устанавливаются четыре кронштейна 13 с помощью восьми винтов М3х10 с гайками. Затягивать винты до установки направляющих валов оси X не следует;
- Фланцы 14 устанавливаются на кронштейны 13 с помощью четырех винтов М3х10 с гайками. Если используются метрические шпильки М6, то необходимо предварительно запрессовать две гайки М6 с помощью тисов. В случае трапецеидальных винтов - грузовые узлы устанавливаются с помощью четырех винтов М3х10 с гайками;
- Четыре линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;
- Для автоматического определения положения каретки перед началом печати опционально крепится механический концевик двумя винтами М3х10 с гайками через шайбы(гайки), исключающие замыкание платы на корпус. Концевик оптического типа устанавливаются аналогично.
-
- Далее устанавливаются два двигателя NEMA17 привода оси с помощью восьми винтов М3х6 и две эластичные муфты 5х6 (5х8 для трапецеидальных винтов). Затем в левой части рамы фиксируется двумя гайками винт регулировки коцевика М3х40.
- Устанавливаются две линейные направляющие ø8мм длиной не менее 325мм и две резьбовые шпильки М6 (трапецеидальные винты). Направляющие фиксируются с помощью двух стопорных колец или "супер" клеем.
-
Ось X (привод каретки)
- В элемент 15 устанавливается кронштейн Bowden экструдера 16 двумя винтами М3х10 с гайками. Если используется экструдер прямой подачи или Вэйда, то выступающую часть кронштейна 16 необходимо отломить по насечкам;
- Затем, при необходимости, устанавливается элемент 17 регулировки концевика оси Х;
- Фиксатором 10 предварительно крепится ремень GT-2 длиной порядка 0,9м с помощью двух винтов М3х10 с гайками. Позже, при регулировке натяжения, излишки ремня можно будет отрезать;
- Три линейных подшипника LM8UU устанавливаются в пазы и притягиваются нейлоновыми стяжками;
-
- Далее каретка в сборе устанавливается на две линейные направляющие ø8мм длиной не менее 400мм. Направляющие фиксируются с помощью восьми винтов оси Z;
- Кареретка перемещается шаговым двигателем типоразмера NEMA17. Двигатель крепится с помощью четырех винтов М3х6. Шкив фиксируется так, чтобы зубчатый венец находился по центру фиксатора ремня. Регулировка натяжения ремня осуществляется двигателем;
- Затем устанавливается ролик ремня винтом М4х20 с гайкой. В качестве ролика рекомендуется использовать два фланцевых подшипника F694ZZ с двумя шайбами М4.
-
Экструдер
Каретка универсальная, предназначена для различных типов экструдера.



-
Сборка и подключение электроники:
1. Основным ВУ принтера является плата Arduino MEGA 2560. Будьте аккуратны при обращении с электроникой, так как статическое электричество опасно и может вывести любую из плат из строя. При выборе места установки платы Arduino проследите, что бы она находилась на не токопроводящей подложке.
2. На плату Arduino сверху устанавливается плата Ramps. Сделайте это, как показано на рисунке снизу.3. Установите «Джамперы» на плату Ramps, для установки драйвера в режим микрошага 1/16, как показано на рисунке снизу.
4. Установите драйвера A4988 на плату Ramps, ВНИМАНИЕ!!! Установите драйвера именно в том направлении как показано на рисунке, в ином случаи драйвер сгорает! (Драйвера DRV8825 ставятся подстроечными резисторами в другую сторону). Приклейте на чипы драйверов радиаторы.
-
5. Обязательно установите принудительный обдув всей электроники вентилятором. В ином случаи ключи, драйвера могут сгореть.
6. Подключение шаговых двигателей, концевиков, термисторов и нагревательных элементов, произведите по схеме приведенной ниже.
7. Моторы оси Z подключаются по параллельной схеме, для исключения перекоса каретки:
8. После сборки всей электрики необходимо сделать настройку тока на драйверах, поворотом подстроченного резистора на каждом из драйверов. Регулировка происходит в пределах поворота по часовой стрелки (для увеличения тока) до 3500, после чего драйвер опять переходит на минимальный ток.
Рекомендуемые углы поворота:
Для экструдера на 3000
Для оси Х, У на 2500
Z на 2000 -
После подстройки, подключите питание принтера, и отправьте каретки в положение "Дом". Попробуйте подергать каретки руками, ток удержания должен быть достаточно высоким и сопротивляться со значительным усилием.
Установка программ и ПО:
После того как драйвера установлены откройте диспетчер устройств Windows-Порты COM-LPT и найдите Arduino Mega 2560, запомните номер порта к которому подключена плата. Далее нужно зайти в свойства этого оборудование, вкладка «Параметры порта», и установите скорость 115200 б/с.
И наконец для работы с принтером нам понадобится управляющая программа. Для новичков подойдет Repitier Host, скачать ее можно здесь https://www.repetier.com/download-now/